自然策略梯度(NPG)¶
自然策略梯度(Natural Policy Gradient,NPG)是一种深度强化学习算法, 其目标是利用 Fisher 信息矩阵(Fisher Information Matrix,FIM)优化策略, 并直接最大化期望回报。该算法由 Sham Kakade 于 2001 年提出。 NPG 已被广泛应用于机器人、金融和博弈论等多种强化学习问题。
下表列出了 NPG 算法的一些基本特征:
NPG 的特征 |
是否具备 |
说明 |
|---|---|---|
同策略(On-policy) |
✅ |
评估策略与目标策略相同。 |
异策略(Off-policy) |
❌ |
评估策略与目标策略不同。 |
无模型(Model-free) |
✅ |
无须预先构建环境动力学模型。 |
基于模型(Model-based) |
❌ |
需要使用环境模型训练策略。 |
离散动作 |
✅ |
可处理离散动作空间。 |
连续动作 |
✅ |
可处理连续动作空间。 |
策略优化¶
NPG 的核心思想是计算期望回报关于策略参数的梯度,以优化策略。 将策略记为 \(\pi(\theta)\),其中 \(\theta\) 为参数向量,则期望回报 \(J(\theta)\) 表示为:
其中,\(\rho^\pi(s)\) 是策略 \(\pi\) 对应的平稳分布。 期望回报关于 \(\theta\) 的梯度为:
策略参数 \(\theta\) 的更新规则为:
其中,\(\alpha\) 为学习率。
Fisher 信息矩阵¶
在 NPG 中,Fisher 信息矩阵(FIM)发挥着关键作用。 FIM 用于衡量随机变量中包含的关于未知参数的信息量。 在策略优化问题中,FIM 根据策略所产生的动作概率分布定义。
对于随机策略 \(\pi(a;s,\theta)\),FIM 定义为:
FIM 具有以下重要性质:
正定性
FIM 通常是正定矩阵。该性质保证基于 FIM 逆矩阵定义的自然梯度是良定义的,并指向期望回报变化最快的方向。
信息量
FIM 中的元素用于衡量参数 \(\theta\) 与动作 \(a\) 之间的信息关联。\(F_s(\theta)\) 的值越大,表明动作分布中包含的关于参数的信息越多;反之亦然。
不变性
FIM 对策略的重新参数化具有不变性。这意味着,只要动作的底层概率分布保持不变,策略所采用的参数化方式就不会影响 FIM 的取值。
FIM 用于定义自然梯度的度量。期望回报对应的自然梯度方向表示为:
其中,\(F(\theta) = E_{\rho^{\pi}(s)} \left[ F_s(\theta) \right]\) 是在策略平稳分布下求得的平均 Fisher 信息矩阵。
Actor-Critic 框架¶
NPG 可以在 Actor-Critic 框架下实现。 在该框架中,Actor 网络负责根据当前状态生成动作, Critic 网络负责估计状态—动作对的价值。 Actor 和 Critic 网络通过联合训练来优化策略。
NPG 的优点包括:
简单且直观:NPG 具有简单、直观的更新规则,能够直接最大化期望回报。
可处理离散和连续动作:NPG 同时适用于离散动作空间和连续动作空间,因此能够用于多种强化学习问题。
数据利用效率较高:NPG 只需要从环境中采样轨迹,尤其在高维空间中,这一过程可以较为高效地完成。
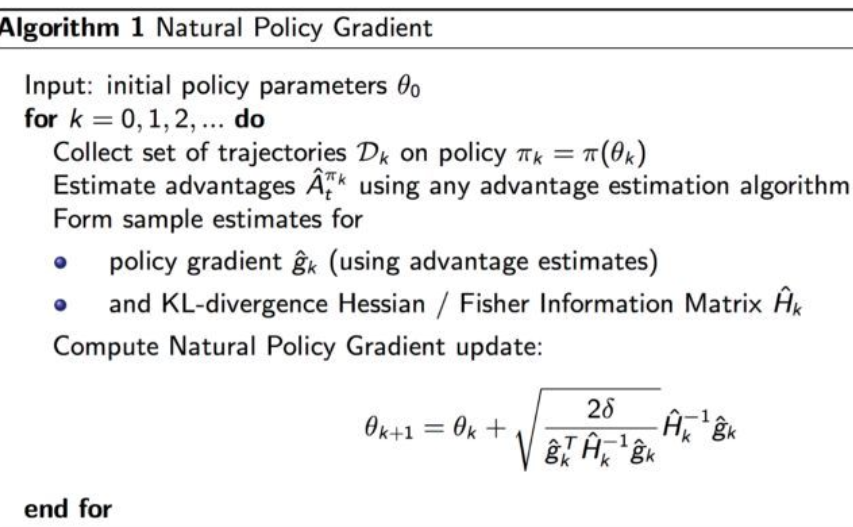
算法¶
训练 NPG 的完整算法如算法 1 所示:
在 XuanCe 中运行 NPG¶
在 XuanCe 中运行 NPG 之前,需要先准备一个 conda 环境,并按照
安装步骤安装 xuance。
运行内置示例¶
完成安装后,可以打开 Python 控制台,并使用以下命令直接运行 NPG:
import xuance
runner = xuance.get_runner(method='npg',
env='classic_control', # 可选项:classic_control、box2d、atari。
env_id='CartPole-v1', # 可选项:CartPole-v1、LunarLander-v2、ALE/Breakout-v5 等。
is_test=False)
runner.run() # 也可以使用 runner.benchmark()
使用自定义配置运行¶
如需使用不同配置运行 NPG,可以新建一个 .yaml 文件,例如 my_config.yaml。
然后使用以下代码运行 NPG:
import xuance as xp
runner = xp.get_runner(method='npg',
env='classic_control', # 可选项:classic_control、box2d、atari。
env_id='CartPole-v1', # 可选项:CartPole-v1、LunarLander-v2、ALE/Breakout-v5 等。
config_path="my_config.yaml", # 请确保 my_config.yaml 文件的路径正确。
is_test=False)
runner.run() # 也可以使用 runner.benchmark()
如需进一步了解配置方法,请参阅 配置教程。
在自定义环境中运行¶
如需在 XuanCe 尚未包含的自定义环境中运行 NPG,
需要按照新环境教程
中的步骤定义新环境。
然后,准备配置文件
npg_myenv.yaml。
完成上述操作后,可以使用以下代码在自定义环境中运行 NPG:
import argparse
from xuance.common import get_configs
from xuance.environment import REGISTRY_ENV
from xuance.environment import make_envs
from xuance.torch.agents import NPG_Agent
configs_dict = get_configs(file_dir="npg_myenv.yaml")
configs = argparse.Namespace(**configs_dict)
REGISTRY_ENV[configs.env_name] = MyNewEnv
envs = make_envs(configs) # 创建并行环境。
Agent = NPG_Agent(config=configs, envs=envs) # 创建一个来自 XuanCe 的 NPG 智能体。
Agent.train(configs.running_steps // configs.parallels) # 对模型进行多个步骤的训练。
Agent.save_model("final_train_model.pth") # 将模型保存到 model_dir。
Agent.finish() # 结束训练。
参考文献¶
@article{kakade2001natural,
title={A natural policy gradient},
author={Kakade, Sham M},
journal={Advances in neural information processing systems},
volume={14},
year={2001}
}