多智能体双延迟深度确定性策略梯度 (MATD3)¶
论文链接: https://arxiv.org/abs/1910.01465
多智能体双延迟深度确定性策略梯度(MATD3)将 TD3 扩展到多智能体领域, 类似于将 DDPG 扩展到 MADDPG 的方式。 其核心目标是减少多智能体强化学习中中心化价值函数的高估偏差。
下表列出了 MATD3 算法的一些一般特性:
MATD3 的特性 |
值 |
描述 |
|---|---|---|
完全去中心化 |
❌ |
智能体之间没有通信。 |
完全中心化 |
❌ |
智能体将所有信息发送给中央控制器,控制器将为所有智能体做出决策。 |
中心化训练与去中心化执行(CTDE) |
✅ |
在训练中使用中央控制器,在执行中放弃。 |
同策略 |
❌ |
评估策略与目标策略相同。 |
异策略 |
✅ |
评估策略与目标策略不同。 |
无模型 |
✅ |
不需要准备环境动力学模型。 |
基于模型 |
❌ |
需要环境模型来训练策略。 |
离散动作 |
❌ |
处理离散动作空间。 |
连续动作 |
✅ |
处理连续动作空间。 |
MATD3 的核心思想¶
目标策略平滑¶
在评判器更新中,为所有智能体的动作添加裁剪的高斯噪声 \(\epsilon=\mathrm{clip}(\mathcal{N}(0,\sigma),-c,c)\): \(a_{j}^{\prime}=\mu_{\theta_{j}^{\prime}}(o_{j}^{\prime})+\epsilon\)。最后,评判器的目标函数表示为:
其中 \(\mu_j^{\prime}\) 是 \(\mu_{\theta_{j}^{\prime}}\) 的简写。
评判器更新¶
评判器损失函数可以表示为:
其中 \(i\) 表示每个智能体。
执行器更新¶
智能体 \(i\) 的确定性策略可以通过梯度下降进行优化:
其中 \(\mu_i\) 是 \(\mu_{\theta_{i}}\) 的简写。
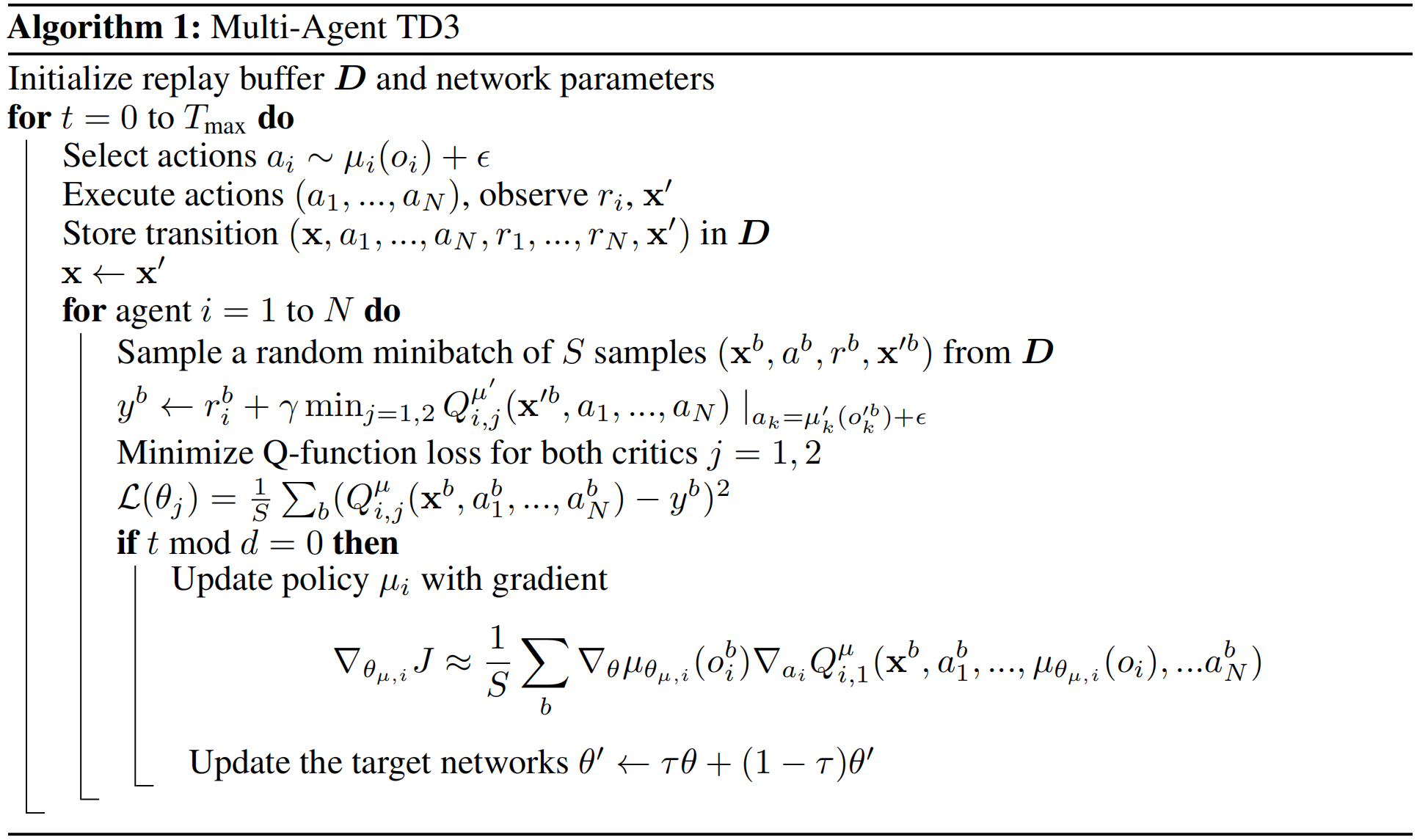
算法¶
MATD3 的完整训练算法如算法 1 所示:
在 XuanCe 中运行 MATD3¶
在 XuanCe 中运行 MATD3 之前,您需要准备 conda 环境并按照
安装步骤 安装 xuance。
运行内置演示¶
完成安装后,您可以打开 Python 控制台并使用以下命令直接运行 MATD3:
import xuance
runner = xuance.get_runner(method='matd3',
env='mpe',
env_id='simple_spread_v3',
is_test=False)
runner.run() # 或 runner.benchmark()
使用自定义配置运行¶
如果您想使用不同的配置运行 MATD3,可以创建一个新的 .yaml 文件,例如 my_config.yaml。
然后,通过以下代码块运行 MATD3:
import xuance
runner = xuance.get_runner(method='matd3',
env='mpe',
env_id='simple_spread_v3',
config_path="my_config.yaml",
is_test=False)
runner.run() # 或 runner.benchmark()
要了解更多关于配置的信息,请访问 配置教程。
使用自定义环境运行¶
如果您想在 XuanCe 中未包含的自己的环境中运行 XuanCe 的 MATD3,
您需要按照
新环境教程 中的步骤定义新环境。
然后,准备配置文件
matd3_myenv.yaml。
之后,您可以使用以下代码在自己的环境中运行 MATD3:
import argparse
from xuance.common import get_configs
from xuance.environment import REGISTRY_ENV
from xuance.environment import make_envs
from xuance.torch.agents import MATD3_Agents
configs_dict = get_configs(file_dir="matd3_myenv.yaml")
configs = argparse.Namespace(**configs_dict)
REGISTRY_ENV[configs.env_name] = MyNewEnv
envs = make_envs(configs) # 创建并行环境。
Agent = MATD3_Agents(config=configs, envs=envs) # 从 XuanCe 创建 MATD3 智能体。
Agent.train(configs.running_steps // configs.parallels) # 训练模型多个步骤。
Agent.save_model("final_train_model.pth") # 将模型保存到 model_dir。
Agent.finish() # 完成训练。
引用¶
@misc{ackermann2019reducingoverestimationbiasmultiagent,
title={Reducing Overestimation Bias in Multi-Agent Domains Using Double Centralized Critics},
author={Johannes Ackermann and Volker Gabler and Takayuki Osa and Masashi Sugiyama},
year={2019},
eprint={1910.01465},
archivePrefix={arXiv},
primaryClass={cs.LG},
url={https://arxiv.org/abs/1910.01465},
}