参数化深度 Q 网络(P-DQN)¶
算法全称:Parameterized Deep Q-Network (P-DQN)
论文链接: https://arxiv.org/pdf/1810.06394
参数化深度 Q 网络(Parameterized Deep Q-Network,P-DQN)是一种面向混合动作空间的强化学习框架。该方法无须对混合动作空间进行近似或松弛,而是将用于处理离散动作空间的 DQN 与用于处理连续动作空间的 DDPG 有机结合起来。
下表列出了 P-DQN 算法的一些基本特征:
P-DQN 的特征 |
是否具备 |
说明 |
|---|---|---|
同策略(On-policy) |
❌ |
评估策略与目标策略相同。 |
异策略(Off-policy) |
✅ |
评估策略与目标策略不同。 |
无模型(Model-free) |
✅ |
无须预先构建环境动力学模型。 |
基于模型(Model-based) |
❌ |
需要使用环境模型训练策略。 |
离散动作 |
✅ |
可处理离散动作空间。 |
连续动作 |
✅ |
可处理连续动作空间。 |
混合动作 |
✅ |
可处理离散—连续混合动作空间。 |
离散—连续混合动作空间¶
混合动作可由如下分层结构定义。首先,从离散集合 \([K]\) 中选择一个高层动作 \(k\);选定 \(k\) 后,再选择与第 \(k\) 个高层动作关联的低层连续参数 \(x_k\in\mathcal{X}_k\)。对于任意 \(k\in[K]\),\(\mathcal{X}_k\) 均为连续集合。
P-DQN 的核心思想¶
在混合动作空间中,将动作价值函数表示为 \(Q(s,a)=Q(s,k,x_k)\),其中 \(s\in S\)、\(k\in[K]\),且 \(x_k\in\mathcal{X}_k\)。设 \(k_t\) 为时刻 \(t\) 选择的离散动作,\(x_{k_t}\) 为与其关联的连续参数,则 Bellman 方程为:
当函数 \(Q\) 固定时,对于任意 \(s\in S\) 和 \(k\in[K]\),可以将
视为一个函数 \(x_k^Q:S\rightarrow\mathcal{X}_k\)。因此,Bellman 方程可以改写为:
与深度 Q 网络类似,P-DQN 使用深度神经网络 \(Q(s,k,x_k;\omega)\) 近似 \(Q(s,k,x_k)\),其中 \(\omega\) 表示网络参数。对于该动作价值网络,使用确定性策略网络
近似 \(x_k^Q\),其中 \(\theta\) 表示策略网络参数。当 \(\omega\) 固定时,希望找到参数 \(\theta\),使得:
随后,与 DQN 类似,可以通过梯度下降最小化均方 Bellman 误差,从而估计参数 \(\omega\)。其 \(n\) 步目标值可写为:
对于动作价值网络参数 \(\omega\),使用与 DQN 类似的最小二乘损失。由于在固定 \(\omega\) 时,需要寻找使 \(Q(s,k,x_k(s;\theta);\omega)\) 最大化的 \(\theta\),因此两个损失函数分别为:
以及
随后使用随机梯度方法更新网络参数。当 \(\omega_t\) 固定时,通过最小化损失函数 \(\ell^\Theta(\theta)\) 更新连续动作参数网络。
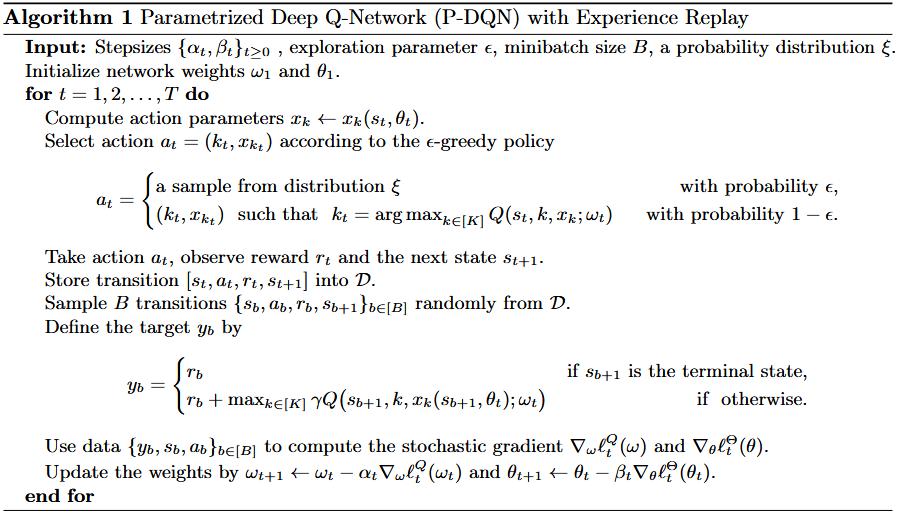
算法¶
训练 P-DQN 的完整算法如算法 1 所示:
在 XuanCe 中运行 P-DQN¶
在 XuanCe 中运行 P-DQN 之前,需要先准备一个 conda 环境,并按照
安装步骤安装 xuance。
使用自定义环境运行¶
如需在 XuanCe 尚未包含的自定义环境中运行 P-DQN,需要按照
新环境教程
中的步骤定义新环境。然后,
准备配置文件
pdqn_myenv.yaml。
完成上述操作后,可以使用以下代码在自定义环境中运行 P-DQN:
import argparse
from xuance.common import get_configs
from xuance.environment import REGISTRY_ENV
from xuance.environment import make_envs
from xuance.torch.agents import PDQN_Agent
configs_dict = get_configs(file_dir="pdqn_myenv.yaml")
configs = argparse.Namespace(**configs_dict)
REGISTRY_ENV[configs.env_name] = MyNewEnv
envs = make_envs(configs) # 创建并行环境。
Agent = PDQN_Agent(config=configs, envs=envs) # 创建一个来自 XuanCe 的 P-DQN 智能体。
Agent.train(configs.running_steps // configs.parallels) # 对模型进行多个步骤的训练。
Agent.save_model("final_train_model.pth") # 将模型保存到 model_dir。
Agent.finish() # 结束训练。
参考文献¶
@article{xiong2018parametrized,
title={Parametrized deep q-networks learning: Reinforcement learning with discrete-continuous hybrid action space},
author={Xiong, Jiechao and Wang, Qing and Yang, Zhuoran and Sun, Peng and Han, Lei and Zheng, Yang and Fu, Haobo and Zhang, Tong and Liu, Ji and Liu, Han},
journal={arXiv preprint arXiv:1810.06394},
year={2018}
}