多智能体近端策略优化 (MAPPO)¶
论文链接: https://proceedings.neurips.cc/paper_files/paper/2022.
背景与研究动机¶
在多智能体强化学习(MARL)领域,协作任务中的协作决策问题一直是近年来的研究热点。传统的多智能体训练方法通常依赖于中心化训练与去中心化执行(CTDE)范式,旨在使用全局信息来提高训练稳定性,同时确保每个智能体在执行阶段仅基于局部观测做出独立决策。
尽管 QMIX 和 MADDPG 等异策略算法在多个基准任务中取得了显著成果,但由于良好的收敛性和稳定性,同策略方法在大规模分布式系统中显示出巨大潜力。其中,近端策略优化(PPO)作为单智能体场景中最成功的策略梯度算法之一,因其简单、高效和超参数鲁棒性强而广受青睐。
然而,在多智能体环境中,PPO 的应用长期以来一直受到质疑,主要基于两个假设:一是其样本效率低于异策略方法;二是单智能体环境中的实现经验难以迁移到多智能体场景。最近的研究表明,经过适当调整后,基于 PPO 的多智能体算法,即多智能体 PPO(MAPPO),在各种协作任务中表现出色,甚至超越了主流异策略基线。这一发现促使学术界重新审视 PPO 在 MARL 中的地位,MAPPO 因此成为一类重要的强基线算法。
下表列出了 MAPPO 算法的一些一般特性:
MAPPO 的特性 |
值 |
描述 |
|---|---|---|
完全去中心化 |
❌ |
智能体之间没有通信。 |
完全中心化 |
❌ |
智能体将所有信息发送给中央控制器,控制器将为所有智能体做出决策。 |
中心化训练与去中心化执行(CTDE) |
✅ |
在训练中使用中央控制器,在执行中放弃。 |
同策略 |
✅ |
评估策略与目标策略相同。 |
异策略 |
❌ |
评估策略与目标策略不同。 |
无模型 |
✅ |
不需要准备环境动力学模型。 |
基于模型 |
❌ |
需要环境模型来训练策略。 |
离散动作 |
✅ |
处理离散动作空间。 |
连续动作 |
✅ |
处理连续动作空间。 |
关键实现细节¶
MAPPO 本质上是标准近端策略优化(PPO)算法在反事实多智能体策略梯度(CTDE)框架下的自然扩展。
策略与价值函数的分离¶
MAPPO 采用两个独立的神经网络:
策略网络 \( \pi_\theta(u^a|o^a) \):参数化智能体的动作分布,以局部观测 \( o^a \) 作为输入并输出动作概率。对于同质智能体(例如,SMAC 中的相同单位类型),采用参数共享机制,通过输入”智能体 ID”来区分不同智能体。
价值网络 \( V_\phi(s) \):仅用于训练阶段的方差减少,以全局状态 \( s \)(例如,MPE 中所有智能体观测的拼接,SMAC 中环境提供的全局战场信息)作为输入并输出状态价值 \( V(s) \)。
参数共享¶
在同质智能体环境中(如大多数 SMAC 地图),MAPPO 通常采用参数共享策略:所有智能体共享同一组策略和价值网络参数。这不仅显著减少了模型参数数量,还提高了数据利用率,有助于缓解多智能体学习中的稀疏奖励问题。
价值估计优化¶
广义优势估计(GAE)¶
使用 GAE 估计优势函数:
并通过优势归一化进一步提高训练稳定性。
价值归一化¶
针对多智能体场景中因大奖励波动导致的价值学习不稳定问题(例如,SMAC 中胜利与失败的奖励差异可达 200 以上),MAPPO 使用运行均值和标准差对价值目标进行归一化:\(V_{\text{norm}}(s_t) = \frac{V(s_t) - \mu_{\text{running}}}{\sigma_{\text{running}} + \epsilon}\)
其中 \(\mu_{\text{running}}\) 和 \(\sigma_{\text{running}}\) 是训练期间实时更新的价值目标的运行均值和标准差,\(\epsilon = 1e-8\) 避免除以零。论文的实证结果表明,这种优化可以将复杂 SMAC 地图(例如,3s5z)的胜率提高 15%-20%。
裁剪机制¶
MAPPO 采用 PPO 的双重裁剪机制,分别作用于策略比率和价值损失:
策略裁剪:
其中 \(r_t(\theta) = \frac{\pi_{\theta}(a_t|o_t)}{\pi_{\theta_{old}}(a_t|o_t)}\)。
价值裁剪:防止价值函数更新过度并提高训练稳定性。
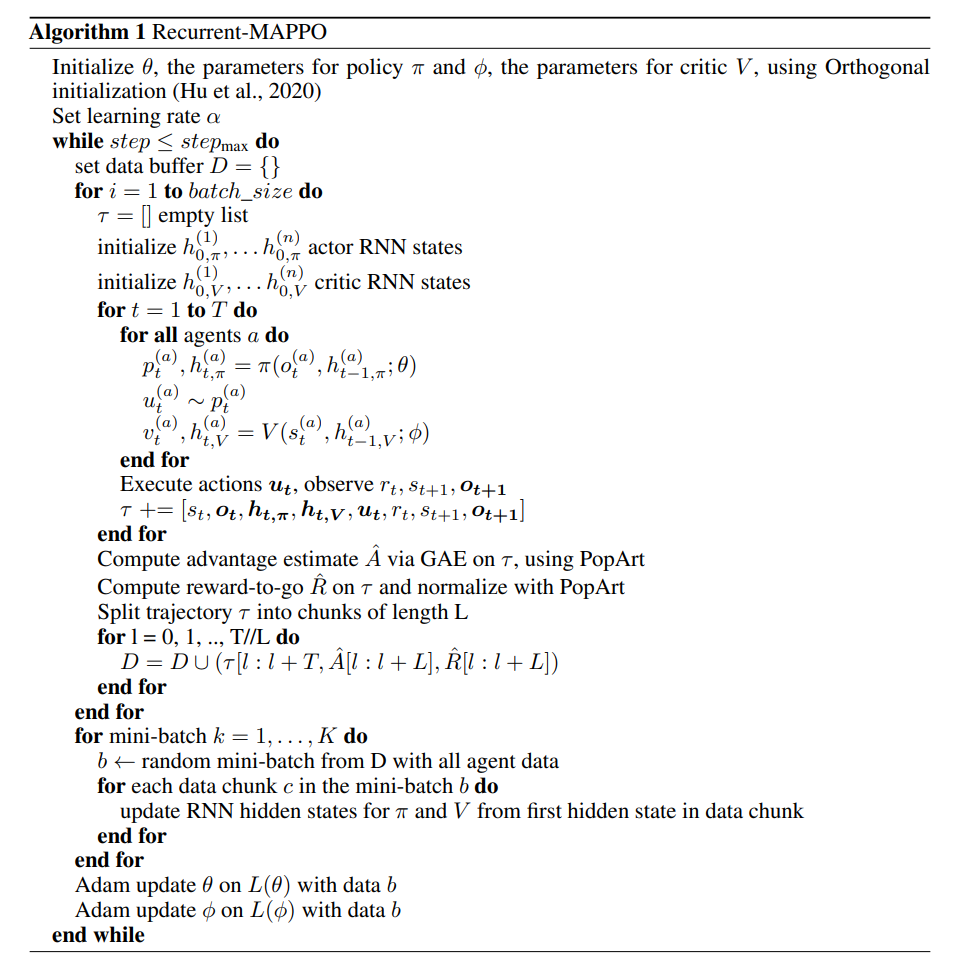
算法¶
MAPPO 的完整训练算法如算法 1 所示:
在 XuanCe 中运行 MAPPO¶
在 XuanCe 中运行 MAPPO 之前,您需要准备 conda 环境并按照
安装步骤 安装 xuance。
运行内置演示¶
完成安装后,您可以打开 Python 控制台并使用以下命令直接运行 MAPPO:
import xuance
runner = xuance.get_runner(method='mappo',
env='mpe',
env_id='simple_spread_v3',
is_test=False)
runner.run()
使用自定义配置运行¶
如果您想使用不同的配置运行 MAPPO,可以创建一个新的 .yaml 文件,例如 my_config.yaml。
然后,通过以下代码块运行 MAPPO:
import xuance
runner = xuance.get_runner(method='mappo',
env='mpe',
env_id='simple_spread_v3',
config_path="my_config.yaml", # my_config.yaml 文件的路径应该是正确的。
is_test=False)
runner.run()
使用自定义环境运行¶
如果您想在 XuanCe 中未包含的自己的环境中运行 XuanCe 的 MAPPO,
您需要按照
新环境教程 中的步骤定义新环境。
然后,准备配置文件
mappo_myenv.yaml。
之后,您可以使用以下代码在自己的环境中运行 MAPPO:
import argparse
from xuance.common import get_configs
from xuance.environment import REGISTRY_ENV
from xuance.environment import make_envs
from xuance.torch.agents import MAPPO_Agents
configs_dict = get_configs(file_dir="mappo_myenv.yaml")
configs = argparse.Namespace(**configs_dict)
REGISTRY_ENV[configs.env_name] = MyNewEnv
envs = make_envs(configs)
Agent = MAPPO_Agents(config=configs, envs=envs)
Agent.train(configs.running_steps // configs.parallels)
Agent.save_model("final_train_model.pth")
Agent.finish() # 完成训练。
引用¶
@article{yu2022surprising,
title={The surprising effectiveness of ppo in cooperative multi-agent games},
author={Yu, Chao and Velu, Akash and Vinitsky, Eugene and Gao, Jiaxuan and Wang, Yu and Bayen, Alexandre and Wu, Yi},
journal={Advances in neural information processing systems},
volume={35},
pages={24611--24624},
year={2022}
}